Robotics · Computer Vision · Autonomy
Follow is an assistive quadrupedal robot designed to identify, lock on to, and follow a person autonomously. Built with a philosophy of smart engineering using minimal hardware and simple algorithms, Follow demonstrates how capable robotic systems can be achieved without complex sensor arrays or expensive components. The robot serves as a service platform for events and conferences — guiding attendees, showcasing robotics technology, and laying the groundwork for future conversational interaction.
The project uses the Unitree Go1 quadrupedal robot as its mobility platform. The Go1 provides a stable, agile base capable of walking across various terrains and indoor environments.
A custom-mounted RGB camera is attached to the front of the Go1 using screws. This single camera serves as the robot's only perception sensor, reinforcing the project's minimal-hardware approach.
All onboard processing is handled by a Jetson Nano NX, providing sufficient GPU-accelerated compute for real-time person detection and re-identification.
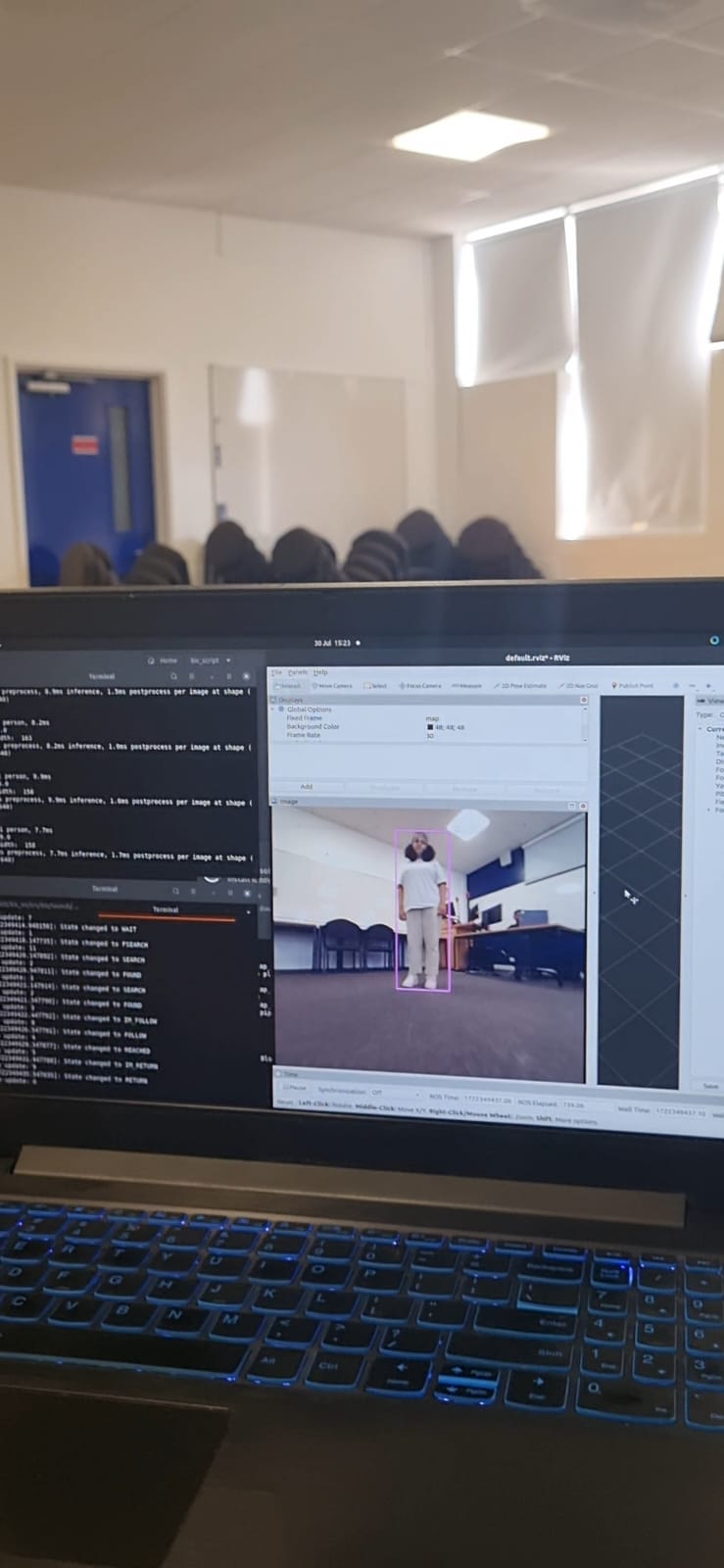
1. The RGB camera captures frames in real time.
2. YOLO detects all people in the frame, producing bounding boxes.
3. FastReID extracts appearance feature embeddings from each detected person and compares them against the locked-on target to maintain persistent identity tracking.
The robot follows the person by sending velocity commands based on the person's position within the camera frame. A PID controller ensures smooth and stable tracking behaviour. Distance to the person is estimated using the width of the detection bounding box as a proxy. The robot maintains a safe distance of approximately 1 meter.
The default state. The robot waits passively for a user to initiate interaction.
Activated when a user verbally says "Follow" while raising their hand. The robot locks on to the person using YOLO detection and FastReID feature embeddings. It then tracks and follows the person, maintaining approximately 1 meter of distance.
Triggered when the tracked person is no longer visible. The robot enters a foraging search behaviour: performs a 360-degree rotation with deliberate stops, analyses each direction for the highest probability match, and moves toward the most likely direction.
Follow was demonstrated live at Zuitzerland, a pop-up village event hosted in Laax, Switzerland, in June 2025.